
自动控制原理是工程学中的一个重要分支,它涉及到自动控制系统的设计、分析和应用。在自动控制系统中,PID控制是一种常用的控制策略,它广泛应用于各种工业过程控制中。本文将详细介绍PID控制的原理和适用场景,并通过Python代码设计一个简单的温度控制实例。
基本原理
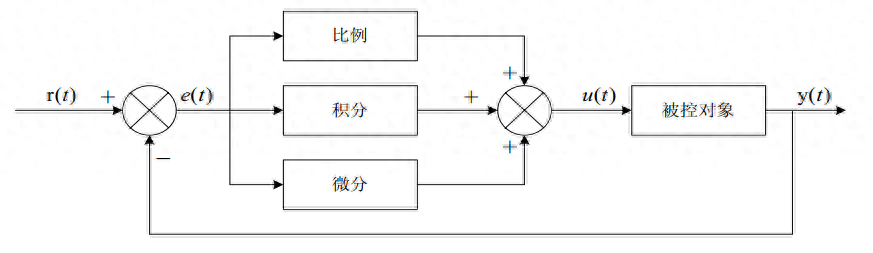
PID控制,即比例-积分-微分控制,是一种基于反馈的控制策略。它通过比例、积分和微分三个基本控制作用的组合,对系统进行调节,以达到期望的控制效果。PID控制的基本原理如下:
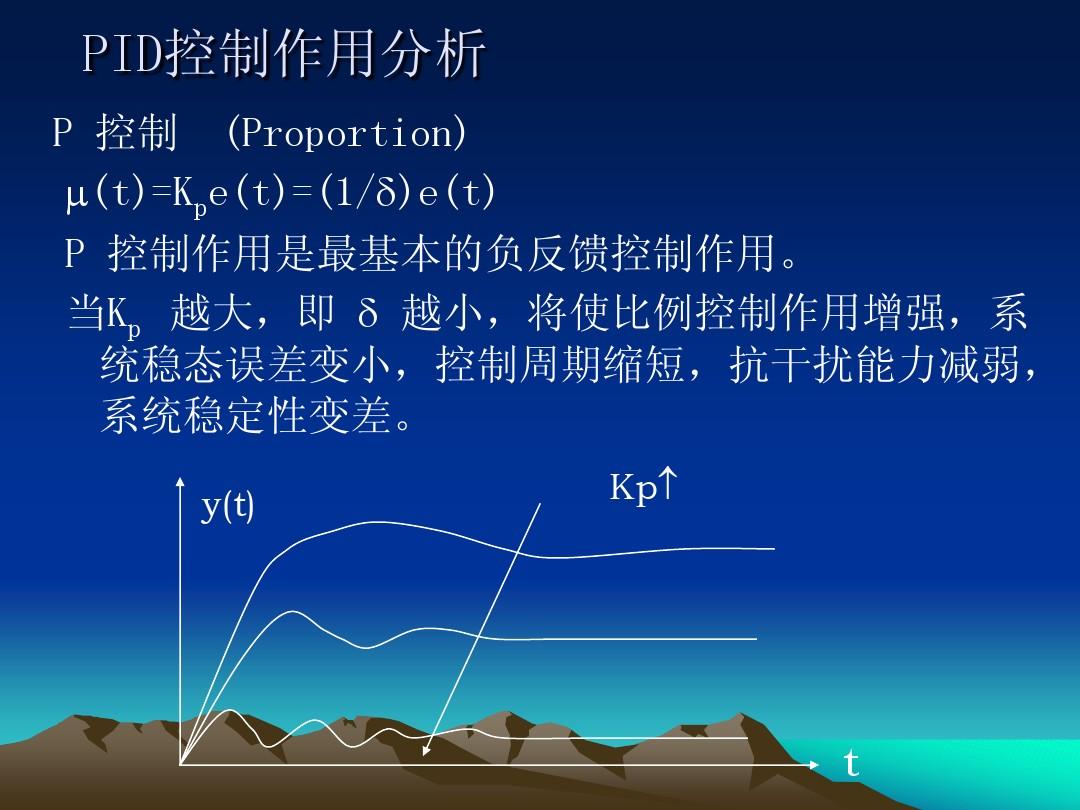
比例控制(P):比例控制的作用是根据系统误差的大小来调节控制量,使得误差减小。比例控制的特点是响应速度快,但容易产生稳态误差。积分控制(I):积分控制的作用是对系统误差进行积分,用来消除稳态误差。积分控制的特点是能够消除稳态误差,但可能会使系统的动态性能变差。微分控制(D):微分控制的作用是根据系统误差的变化率来调节控制量,以抑制系统的过冲和振荡。微分控制的特点是能够提高系统的动态性能,但可能会增加系统的噪声。
适用范围
PID控制的适用场景非常广泛,包括但不限于以下几种:
流量控制:如水流、气流等流体的流量控制。温度控制:如工业炉、锅炉、空调等设备的温度控制。压力控制:如压缩机、液压系统等设备的压力控制。速度控制:如电机、发动机等设备的速度控制。应用实例
下面,我们将通过Python代码设计一个简单的温度控制实例,详细说明实现过程。
import time
import numpy as np
class PIDController:
def __init__(self, Kp, Ki, Kd, setpoint):
self.Kp = Kp
self.Ki = Ki
self.Kd = Kd
self.setpoint = setpoint
self.integrated_error = 0
self.last_error = 0
def update(self, current_temp):
error = self.setpoint - current_temp
delta_error = error - self.last_error
self.integrated_error += error
output = (self.Kp * error) + (self.Ki * self.integrated_error * 0.1) - (self.Kd * delta_error * 0.1)
self.last_error = error
return output
# 设定PID参数
Kp = 1.0
Ki = 0.2
Kd = 0.5
setpoint = 25.0 # 目标温度
# 初始化PID控制器
pid = PIDController(Kp, Ki, Kd, setpoint)
# 模拟温度控制系统
current_temp = 20.0 # 初始温度
print(f"Target temperature: {setpoint}°C")
print(f"Current temperature: {current_temp}°C")
for _ in range(100):
# 假设这是一个从温度传感器读取的温度值
current_temp += pid.update(current_temp)
print(f"Current temperature: {current_temp}°C")
time.sleep(1) # 等待1秒
在这个例子中,创建了一个PIDController类,它接受比例、积分、微分增益和设定点作为参数。update方法根据当前温度计算PID输出pid控制,并更新积分误差和上次误差。最后,模拟了一个温度控制系统,通过循环调用update方法并打印当前温度来展示PID控制器的工作过程。
总结
PID控制作为一种经典的控制策略,在自动控制原理中占有重要地位。它通过比例、积分和微分三个基本控制作用的组合,能够有效地对系统进行调节pid控制,以实现期望的控制效果。PID控制适用场景广泛,包括流量控制、温度控制、压力控制和速度控制等。在实际应用中,PID控制器的参数需要根据具体情况进行调整,以达到最佳的控制效果。随着科技的发展,PID控制还可以与其他控制策略相结合,如模糊控制、自适应控制等,以应对更复杂的控制需求。总之,PID控制作为一种重要的自动控制技术,将继续在各个领域发挥重要作用。
———END———
限 时 特 惠: 本站每日持续更新海量各大内部创业教程,一年会员只需98元,全站资源免费下载 点击查看详情
站 长 微 信: Lgxmw666




